 销售经理:
黄俊
销售经理:
黄俊  联系电话:
13607289999
联系电话:
13607289999  办公电话:
0722-3817899 传真号码:
0722-3801233
办公电话:
0722-3817899 传真号码:
0722-3801233  客服QQ:
客服QQ:
客服QQ:
客服QQ:
 微信号:
13607289999
微信号:
13607289999  企业邮件:
szhj9999@163.com
企业邮件:
szhj9999@163.com 

微信扫码
不仅是专业的导购
还是聊车的好伙伴
微信扫码
不仅是专业的导购
还是聊车的好伙伴
高空作业车是电力、通讯、交通、市政、消防、救 援、建筑等行业进行施工、维护修理等作业的理想设 备。随着我国国民经济的蓬勃发展,高空作业车的需 求量迅速上升。高空作业车的升降方式有折叠式、伸 缩式和混合式等多种形式,作业高度从十几米到几 十米不等,其工作平台的调平方式经历了从自重调 平到电液调平的发展过程。
本文介绍高空作业车 工作平台常用的调平技术。
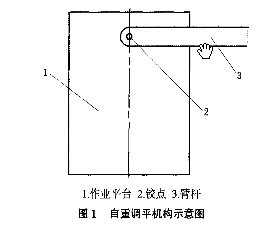
1、利用平台自重的调平机构 利用平台自重调平是出现最早、结构最简单的 一种工作平台调平方式,其原理见图1,平台的重心 在作业平台1与臂杆3连接的转动铰点2的正下方,且靠近底部,利用工作平台和载荷的重力作用使 平台无论如何升降都能自动保持水平状态。该方法 结构简单、重量轻、调整维修方便、成本低,但易晃,特别是当操作人员在平台中的位置变动时,平台 产生摇动,操作人员有不安全的感觉,因此在平台达 到作业位置后要使用锁紧机构防止摇动,操作起来比较麻烦,只在工作高度较低、技术性能低的作业车 上使用,现在已较少采用。
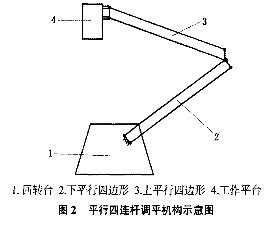
2、平行四连杆调平机构 平行四连杆调平机构由一组或多组平行四边形 连杆机构组成,原理见图2,调平机构一端与工作平 台4相连,另一端与回转台1连接,上平行四边形3和下平行四边形2相连处的短边固联在一起,利用 平行四边形在变形过程中两组对边始终分别保持平 行的原理,无论折叠臂如何升降,工作平台始终保持 水平状态。其调平过程是连续的,具有调平可靠、同 步眭好的特点。且在实际应用中折叠臂本身可以作 为平行四边形的一个边,因此结构比较简单,主要用 在折叠臂式高空作业车上。缺点是平行四连杆机构 只能在臂杆外侧布置,结构不紧凑,由于平行四连杆 的限制,臂杆之间的工作角度范围小于180度。
3、链条链轮式调平机构链条链轮式调平机构是由平行四连杆调平机构演变而来的,原理见图3,链轮3固定在工作平台2 上,链轮6固定在回转台1上,4和5都是双联链轮,所有链轮齿数和齿形参数均相同,链轮之间绕有 链条。由于链轮3和6分别固定在工作平台和回转 台上,当臂杆变幅时,链条强制带动工作平台作相应 的反方向角度变化,无论臂杆如何升降都能保证平 台处于水平状态。
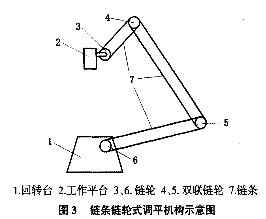

链条链轮式调平机构比平行四连杆调平机构的 工作角度更大,臂杆之间的工作角度范围大于 180度,且链条、链轮可以安装在臂杆内部,结构紧凑,易于安装、调整和维护。 根据实际需要,可以用平行四连杆和链条链轮组成混合式调平机构,布置更加灵活,如图4所示, 链轮4与上平行四边形3的短边固联在一起,在臂 杆的升降过程中,工作平台始终保持水平。
4、静液压调平机构 静液压调平也称为液压伺服液压缸调平,如图 5所示,主体部分由两只结构尺寸完全相同的调平 液压缸I和调平液压缸Ⅱ组成。两根液压缸的无杆 腔与无杆腔相连,有杆腔与有杆腔相连,能保证一只液压缸伸长(缩短)一定长度,另一只液压缸缩短(伸 长)相同的长度。调平液压缸I连接在回转台1与臂 杆2之间,调平液压缸Ⅱ连接在臂杆2与工作平台 3之间。当臂杆变幅时,调平液压缸I长度发生改变,与工作平台相连的调平液压缸Ⅱ发生相反方向的长度改变。调平液压缸I伸长一段距离,/ABC增加;调平液压缸Ⅱ缩短相同的距离,厶4’B’C’减 少。合理设计AABC和△A’B 7c7的边长,厶4’B’C7减 少的角度约等于/_ABC增加的角度,从而使工作平 台保持水平。两只调平液压缸组成闭环系统,不受外 部系统的影响,为防止密封和接头处泄漏影响工作 平台的调平性能,需在系统中安装补油装置。这种调 平机构具有结构简单、成本低、精度高的特点,适用 于伸缩臂式高空作业车。但存在滞后现象,且滞后现 象随着高度的增加而更加明显。
5、电液调平机构 电液调平的基本工作原理是通过安装在工作平 台上的水平传感器来感知平台的状态,并产生一个 相应的电流,控制调平液压缸的动作,最终使平台保持水平状态。
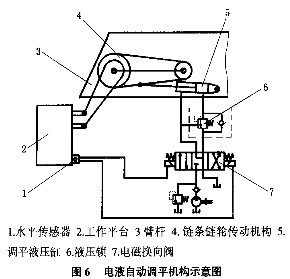
电液调平机构又分为电液自动调平和 电液比例调平。 如图6所示,电液自动调平机构主要部件包括 水平传感器1、调平液压缸5和电磁换向阀7。其中 水平传感器1安装在工作平台2上,当工作平台处 于水平状态时,水平传感器输出电流为零,当工作平 台发生倾斜时,水平传感器产生控制电流,电流的大 小不随工作平台的倾斜角度变化而改变。根据工作 平台倾斜方向的不同,控制电流进入电磁换向阀7 的2个电磁线圈中的1个,使电磁换向阀工作,调平 液压缸5伸长或缩短,带动链轮链条传动机构4运 动,最终使工作平台趋于水平。调平是不连续的,适 用于折叠臂式和伸缩臂式高空作业车。 时恢复水平的速度快,工作平台与水平面之间夹角 小时恢复水平的速度慢,因此其调平过程连续、平稳,调平性能好、控制精度高、动态响应快,适用于各 种形式的大高度的高空作业车。
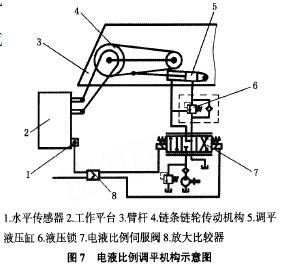
如图7所示,电液比例调平机构由水平传感器 1、调平液压缸5、电液比例伺服阀7和放大比较器 8组成。与电液自动调平机构不同的是,水平传感器 输出信号的大小与工作平台的倾斜角度成正比。当 臂杆变幅时,工作平台与水平面产生一定的夹角, 水平传感器输出相应大小的信号,经放大比较器放 大、判定方向后,由驱动电路输入到电液比例伺服 阀7中相应的比例电磁铁,比例伺服阀的阀芯产生 位移,输出压力液体,压力液体的流量与控制电流 成比例,即与工作平台的倾斜角度成正比,压力液 体作用于调平液压缸5两腔中的一腔,使活塞杆伸 长或缩短,控制工作平台发生与原倾斜方向相反的 转动,工作平台恢复到水平状态。在工作平台倾斜 角度减小的过程中,水平传感器输出信号变小,压 力液体的流量减少,工作平台与水平面之间夹角大。
|
|
|
重汽豪沃检修车(大流量排水抢险车) 整车型号:CL5040TPS6ACC 现车价格美丽 底盘配置:豪华宽体驾驶室、潍柴151、160马力、万里扬5档、2.0T/4.5T、700R16钢丝胎、原厂导流罩,半包围驾驶室内饰,液晶仪表盘,带中控、电窗、织物座椅、气喇叭、原厂空调,全包裹、车钥匙远程遥控玻璃升降!重汽豪沃检修车(大流量排水抢险车)图片展示:
销售部总经理:黄俊 13607289999
销售部经理:叶冰花 15897606159
业务经理:黄威 13886862266
业务经理:张椿梅 15997903088

程力汽车公司主要销售:冷藏车、吸污车、环卫垃圾车、吸粪车、道路清扫车、高空作业车 地址:湖北省·随州市·南郊平原岗·程力汽车工业园 网站备案号:鄂ICP备18017768号-134

 鄂公网安备 42130202001503号
鄂公网安备 42130202001503号



